StarMap navigation system
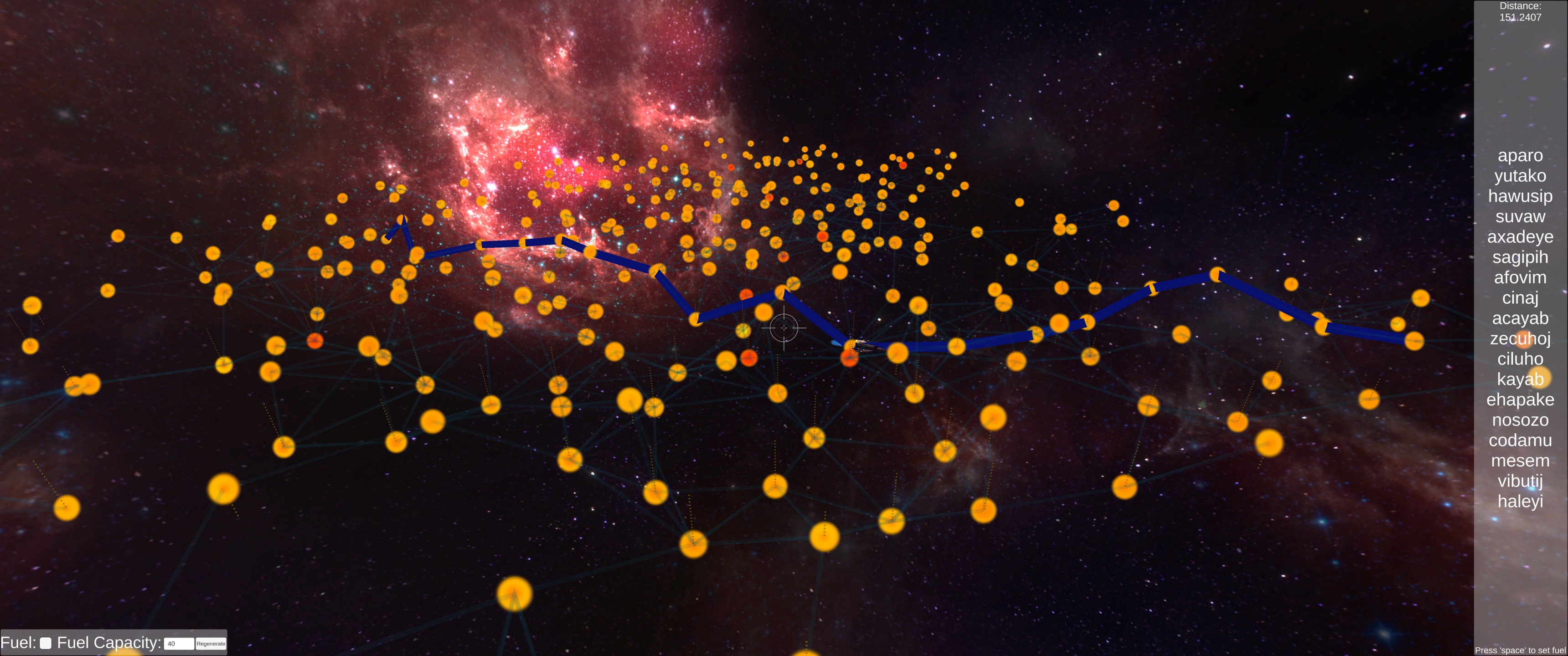
In this project i created a navagation system using A* pathfinding and incorperated the limitation of limited fuel. So the pathfinding has to fuel at fuel stars whilst still finding the shortest path. This is found thourgh a procedurely generated map of stars
Key Features:
- Procedural Map Generation: Star systems are dynamically generated, creating a unique spatial layout for each run.
- A* Pathfinding Algorithm: Efficiently calculates the shortest path between origin and destination, factoring in fuel limitations.
- Fuel Management Logic: The algorithm identifies optimal refueling points to ensure the ship can reach its destination without running out of fuel.
- Dynamic Constraints: The system adapts to varying fuel capacities and star distributions, making each navigation challenge distinct.
Language: C#
Engine: Unity